Digitalización de señales analógicas
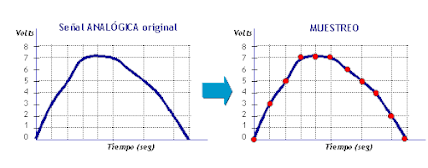
Una vez definidas las diferencias entre sistemas o circuitos analógicos y digitales, es conveniente saber cómo se produce la conversión de la información analógica en digital, dicho de otra forma, " digitalización de señales analógicas La digitalización de señales analógicas o conversión analógica-digital (CAD) , es la transformación de señales analógicas en señales digitales, para simplificar su posterior proceso de codificación, compresión, etc. y de esta forma obtener una señal más conveniente para el trabajo, más inmune al ruido. Una conversión analógico-digital está formado por los siguientes procesos: Muestreo: se toman diferentes valores en el tiempo de la señal analógica. Dependiendo de la cantidad de valores tomados o muestras, la información obtenida será más o menos completa. La velocidad con la que se toman las muestras se denomina: frecuencia o velocidad de muestreo. Una frecuencia de muestreo de 24kHz quiere decir que se toman 24.000 muestras en un segundo. Un...